Трехосевые сервоусилители Sigma 10 SGMXT
Характеристики cервоусилителей SGDXT

Выбор MECHATROLINK-4 или MECHATROLINK-III на одном и том же оборудовании
Обеспечивает управление моментом, положением и скоростью, а также синхронизированное управление фазой с исключительной точностью
Меньше проводов / Меньший размер
Реализует профиль привода CiA 402 CANopen для EtherCAT (реальное время Ethernet)
Предоставляет интерфейс EtherCAT для Σ-X серии: высокоуровневое управление сервоприводами, расширенные функции настройки и полноценное управление актуатором
Меньше проводов / Меньший размер
SGDXT — это серия сервоприводов Sigma‑X для EtherCAT‑сетей, ориентированная на высокоскоростные, многоосевые промышленные системы. Они обеспечивают высокую синхронизацию, маленький цикл обновления и простую интеграцию с контроллерами iCube Control и промышленными ПЛК.
Документация
Схема маркировки SGDXT
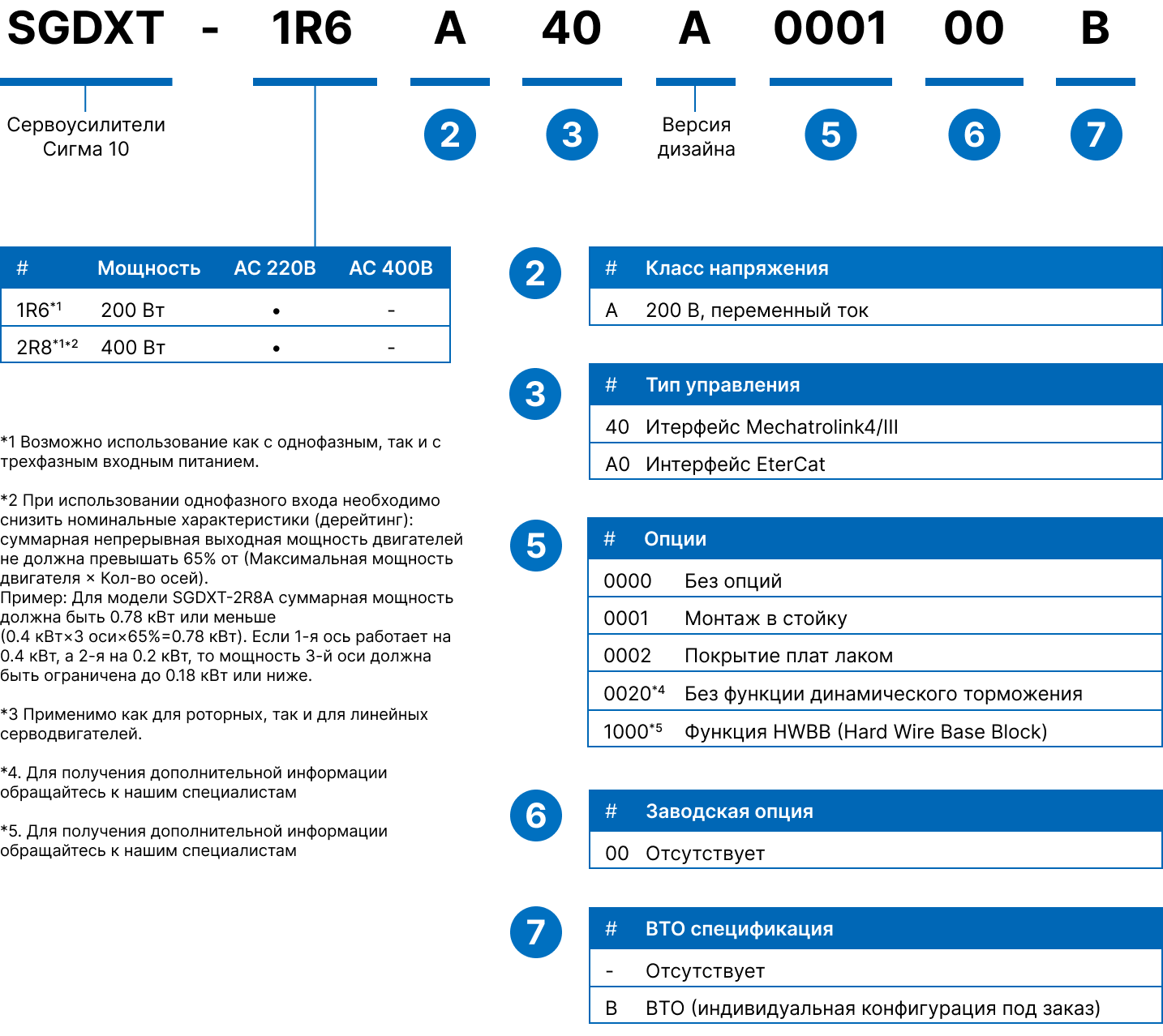
Таблица выбора cервоусилителя SGDXT
| Питание 1 фаза 200 В | |||
| Мощность | Mechatrolink-4/III (40) | EtherCAT (A0) | |
| 3 x 0.2 кВт (200W) | SGDXT-1R6A40A-1000 | SGDXT-1R6AA0A-1000 | |
| 3 x 0.4 кВт (400W) | SGDXT-2R8A40A-1000 | SGDXT-2R8AA0A-1000 | |
| Питание 3 фазы 400 В | |||
| Мощность | Mechatrolink-4/III (40) | EtherCAT (A0) | |
| 3 x 0.2 кВт (200W) | SGDXT-1R6A40A-1000 | SGDXT-1R6AA0A-1000 | |
| 3 x 0.4 кВт (400W) | SGDXT-2R8A40A-1000 | SGDXT-2R8AA0A-1000 | |