Двухосевые сервоусилители Sigma 10 SGMXW
Характеристики cервоусилителей SGDXW

Поддержка MECHATROLINK-4 или MECHATROLINK-III с одинакового аппаратного обеспечения
Обеспечивает управление моментом, положением и скоростью, а также синхронизированное фазовое управление с исключительной точностью
Использование регенеративной энергии от нескольких осей в качестве энергии привода
Реализует профиль привода CiA 402 CANopen для EtherCAT (коммуникации реального времени по Ethernet)
Предоставляет интерфейс EtherCAT для сервоприводов серии Σ-X: высокопроизводительное управление, расширенные функции настройки и полный функционал управления исполнительными механизмами
Использование регенеративной энергии от нескольких осей в качестве энергии привода
SGDXW — серия сервоприводов Sigma‑X, ориентированная на CANopen‑сеть и системы среднего уровня автоматизации. Они сочетают компактный форм‑фактор, простое подключение по шине и высокую точность позиционирования, что делает их удобными для модульных линий и компактного оборудования.
Документация
Схема маркировки SGDXW
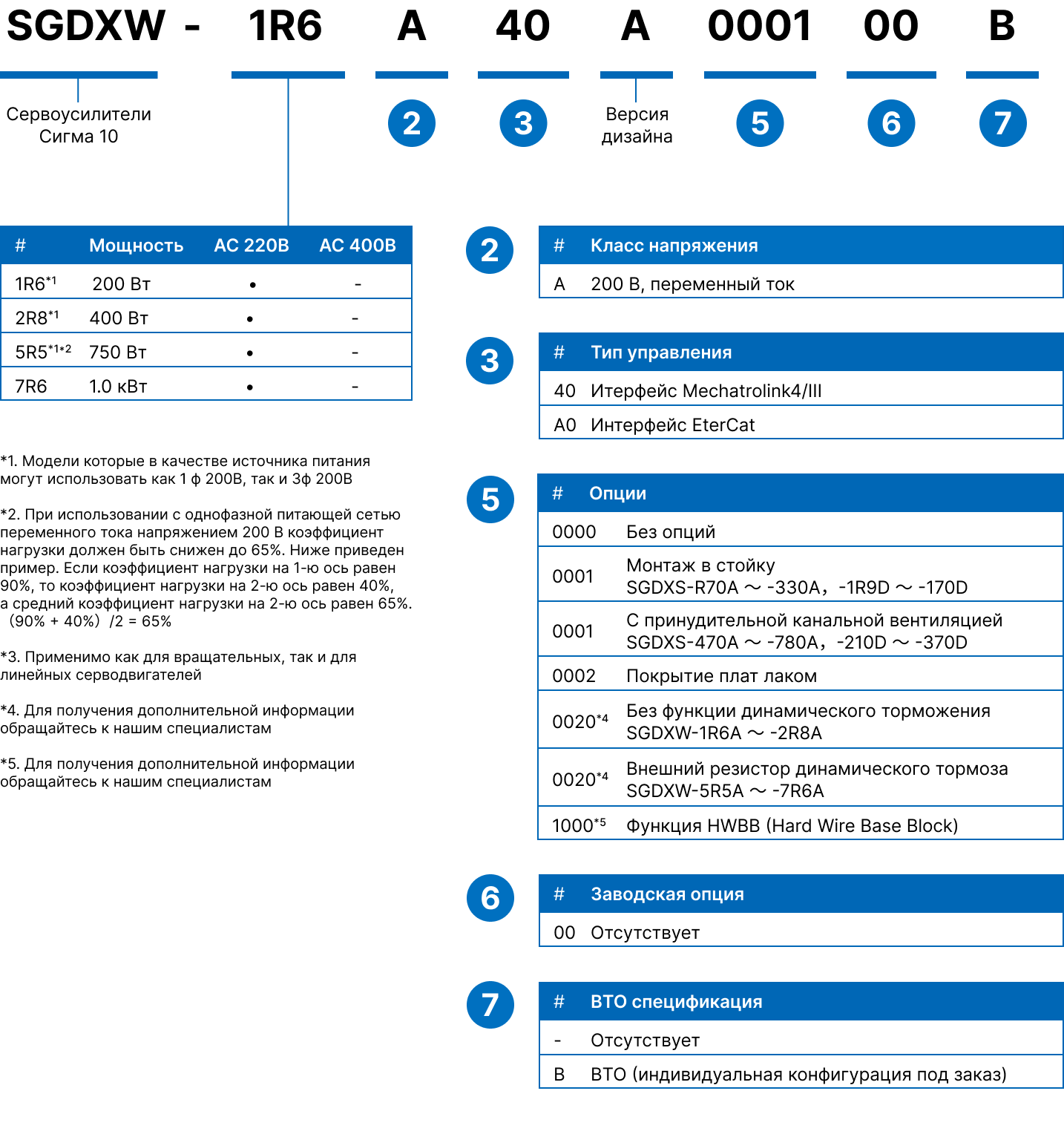
Таблица выбора cервоусилителя SGDXW
| Питание 1 фаза 200 В | |||
| Мощность | Mechatrolink-4/III (40) | EtherCAT (A0) | |
| 2 x 0.2 кВт (200W) | SGDXW-1R6A40A-1000 | SGDXW-1R6AA0A-1000 | |
| 2 x 0.4 кВт (400W) | SGDXW-2R8A40A-1000 | SGDXW-2R8AA0A-1000 | |
| 2 x 0.75 кВт (750W) | SGDXW-5R5A40A-1000 | SGDXW-5R5AA0A-1000 | |
| Питание 3 фазы 400 В | |||
| Мощность | Mechatrolink-4/III (40) | EtherCAT (A0) | |
| 2 x 0.2 кВт (200W) | SGDXW-1R6A40A-1000 | SGDXW-1R6AA0A-1000 | |
| 2 x 0.4 кВт (400W) | SGDXW-2R8A40A-1000 | SGDXW-2R8AA0A-1000 | |
| 2 x 0.75 кВт (750W) | SGDXW-5R5A40A-1000 | SGDXW-5R5AA0A-1000 | |
| 2 x 1.0 кВт | SGDXW-7R6A40A-1000 | SGDXW-7R6AA0A-1000 | |